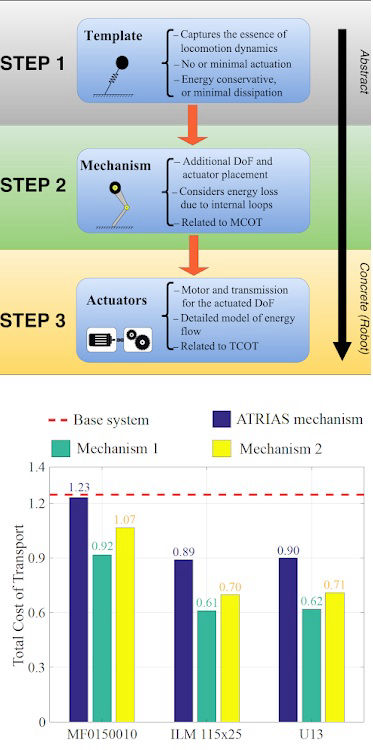
Robot leg design is critical for the success of a legged robot, both in terms of efficiency and control. We proposed a three-stage framework for design of a leg mechanism based on a template:
• Select a template.
• Optimize the mechanism for best placement of the actuators.
• Optimize the actuators.
A high source of energy loss is the so-called "geometric work", which happens when two or more actuators work against each other. We presented a general theorem for avoiding such losses in a mechanism designed based on a reduced-order model and showed the mechanism of ATRIAS can be changed to improve the energy consumption by about 30% .
Actuator design is another factor that can lead to better and more efficient leg design. An optimization framework with a detailed model of electric actuators (considering all relevant components and constraints) was developed, which can ensure the optimal selection of motors and transmissions. As the figure shows, the combination of optimal mechanism design and actuator selection can lead to a more than 50% decrease of total cost of transport compared to a walking experiment with the base system (ATRIAS). This is of significant importance for the untethered operation of legged systems. We still have yet to achieve the remarkable efficiency of human (COT=0.2), but with these optimal design methods and new motor technologies it is not out of reach.
See the following articles for our optimization scheme for further details:
• Rezazadeh, S., Abate, A., Hatton, R.L., and Hurst, J.W., “Robot Leg Design: A Constructive Framework”, IEEE Access, 6(1), pp. 54369-54387, 2018. (PDF)
• Rezazadeh, S. and Hurst, J.W., “On the Optimal Selection of Motors and Transmissions for Electromechanical and Robotic Systems”, IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Chicago, IL, USA, 2014.